

BASE Robotics
Role
Industry
Founding
Mechanical
Engineer
Robotics &
Physical AI
SolidWorks
Python, MATLAB
Jira, Figma,
Waterjet cutting,
rapid prototyping
Tools
Duration
1 year
Mechanical Design
Embedded Systems
Rapid Prototyping
Skills
Autonomous Verification Rover for Industrial Site Inspection
Base Robotics is an autonomous ground robotics platform designed for industrial infrastructure inspection and verification workflows. The system combines autonomous navigation, modular hardware architecture, remote operations tooling, and environmental field deployment capabilities for large-scale outdoor sites.
As the founding mechanical engineer on the project, I led the mechanical architecture, product hardware requirements, system integration, rapid prototyping, fabrication, and field deployment of the rover platform and the docking station.
Rover Mechanical Architecture
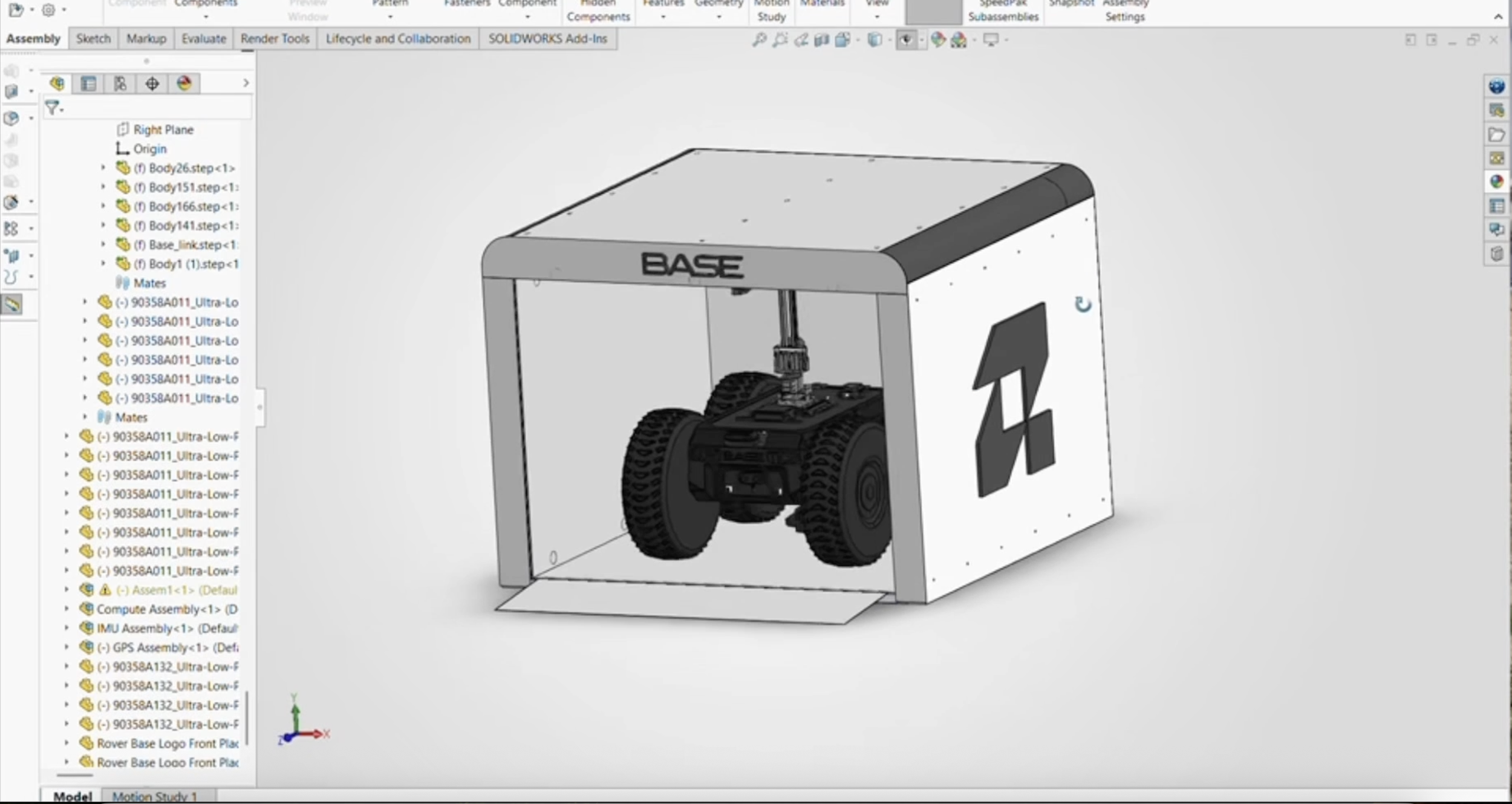
Docking Station
Designed and prototyped a modular docking and charging enclosure to support autonomous deployment workflows and protected rover storage in outdoor environments.
The system was developed around real-world deployment constraints, including:
Rapid, easy on site assembly
packaging optimization for transport and shipping
Structural rigidity under outdoor loading conditions (wind, rain, hail, etc.)
Environmental shielding from dust, rain, and heat
Repeatable field setup workflows
Multiple enclosure iterations were tested to improve assembly speed, rigidity, and transportability during field deployment preparation.
Led the mechanical development of an autonomous rover platform designed for rugged outdoor operation in utility-scale solar environments.
Key areas of focus included:
Structural integration and payload
Sensor and electronics mounting architecture
Thermal camera and robotic arm integration
Environmental durability considerations
Modular serviceability and rapid iteration
Cable routing and system accessibility
The rover platform was designed to support continuous outdoor operation while remaining modular, lightweight, and easy to transport and service in the field.
Robotics Integration
Worked closely across software, autonomy, and electrical systems to integrate sensing, inspection, and operational hardware into a cohesive field robotics platform.
Integrated systems included:
LiDAR and depth sensing hardware
Thermal inspection cameras
Autonomous navigation compute stack
Telemetry and communications hardware
Modular payload and inspection tooling
Operator control and monitoring workflows
A major focus of the project was balancing robustness, accessibility, and rapid integration across evolving hardware and software systems.
Field Deployment & Testing
Led rapid prototyping, assembly, testing, and deployment preparation for live outdoor demos and field operations workflows.
Development included:
Fabrication and integration of prototype hardware
Rover testing across uneven outdoor terrain
Environmental testing and iteration
Shipping and transport preparation
On-site assembly optimization
Live telemetry and remote operations validation
We had 5 weeks to build a demo to show potential clients.
The platform was iterated quickly through real-world deployment feedback and emphasized practical engineering tradeoffs and fast integration cycles.
Outcome
After roughly six months of planning, sourcing materials, and business development — followed by just over five weeks of building inside a tiny NYC apartment with no car and no workshop — we had a working rover ready to showcase.
What we demonstrated:
Remote dispatch workflows
Autonomous traversal
Live telemetry streaming
Industrial inspection operations
Modular sensor integration
Field deployment in outdoor environments
The project laid a real foundation for scalable autonomous infrastructure inspection - and proved that continuous robotic field operations in industrial environments aren't just theoretical.
My take take away from this project: the constraints were brutal, and that's kind of the point. No car, no dedicated space, no ideal conditions - just a problem worth solving and enough stubbornness to see it through.
Nothing is impossible without enough imagination, resourcefulness, and determination.